RNN原理及pytorch实现
图像理解
注意细节
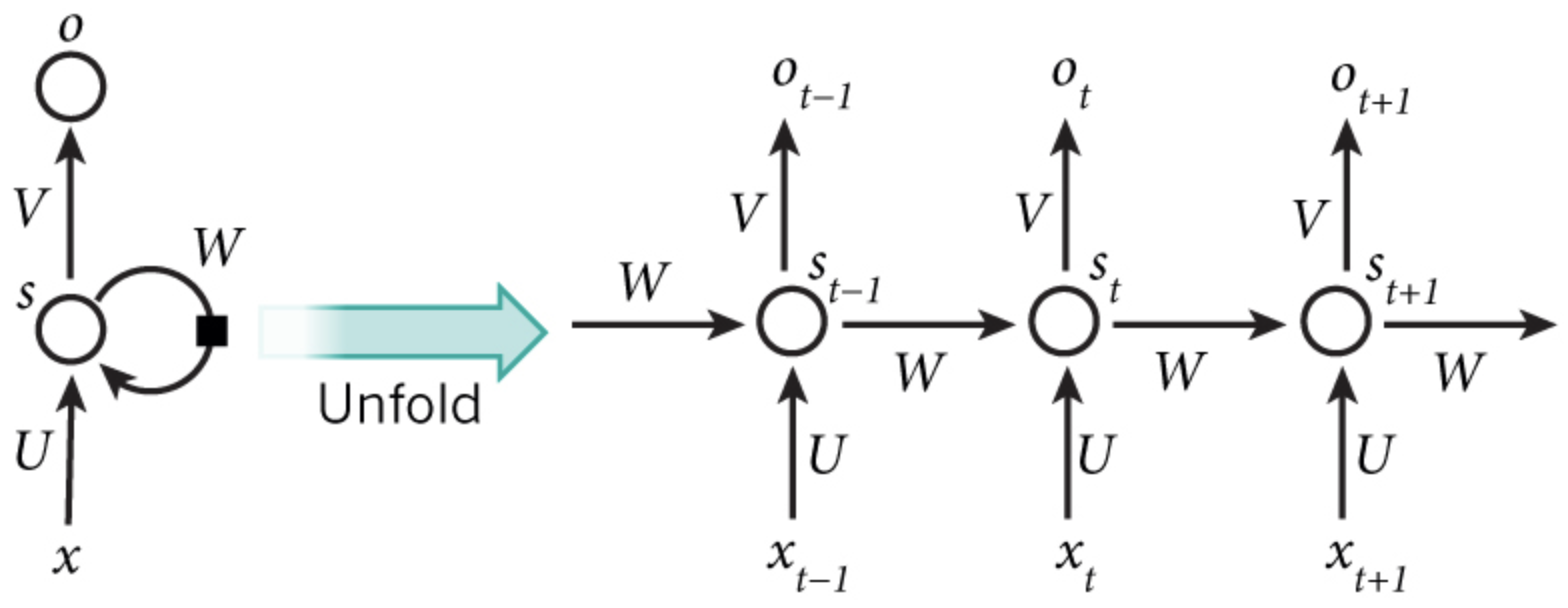
- RNN只有这四个参数:$U,W$,对于RNN和特定任务相结合,使用隐藏状态的输出,得到预测结果,也就是分类器部分,才有分类器的参数$V$,并不是RNN的参数。
-
横向展开的每个timestep共享权重。
-
pytorch中的激活函数:tanh 或者 relu,因为pytorch直接使用的cudnn接口,cudnn中只支持这两种。
-
pytorch中,RNN的默认输入形状是(seq_len, batch_size, input_size),batch_size位于第二维度,因为cuDNN中RNN的API就是batch_size在第二维度!把batch_first设置为True,可以将batch_size和序列长度seq_len对换位置。batch first意味着模型的输入(一个Tensor)在内存中存储时,先存储第一个sequence,再存储第二个… 而如果是seq_len first,模型的输入在内存中,先存储所有序列的第一个单元,然后是第二个单元.

公式理解
正向传播公式
RNN迭代式 分类器 损失:把整个timestep的数据当成一个训练数据。
反向求导(BPTT:back propagation through time)
BPTT是关于标准RNN的名称。对每个参数的求导,都要各个timestep加起来。即:

以$\frac{\partial{E_1}}{\partial{W}}$为例:


1)$V$的反向求导比较简单,,与等无时间序列无关
根据链式法则:
$$
\begin{align}
\frac{\partial{E_t}}{\partial{V}}&=\frac{\partial{E_t}}{\partial{\hat{y_t}}}·\frac{\partial{\hat{y_t}}}{\partial{z_t}}·\frac{\partial{z_t}}{\partial{V}}
&=(-y_t^T·\frac{1}{\hat{y_t}})(\frac{\partial{\hat{y_t}}}{\partial{z_t}})(s_t)
&=(\hat{y_t}-y_t^T)\otimes s_t
\end{align} $$ 注意:这里$z_t,y_t$都是向量,$\frac{\partial{\hat{y_t}}}{\partial{z_t}}$这个导数就是softmax的求导,因此是个分段函数,根据下面补充的结论,可推出最后的结果。最后的外积,是根据纬度推导出来的,比如有k个类,$\hat{y_t},y_t$都是k维的,$s_t$为隐藏状态输出,是h维的,而V是个矩阵,也就是$k\times h$维的(左乘),因此,就是外积。
补充:
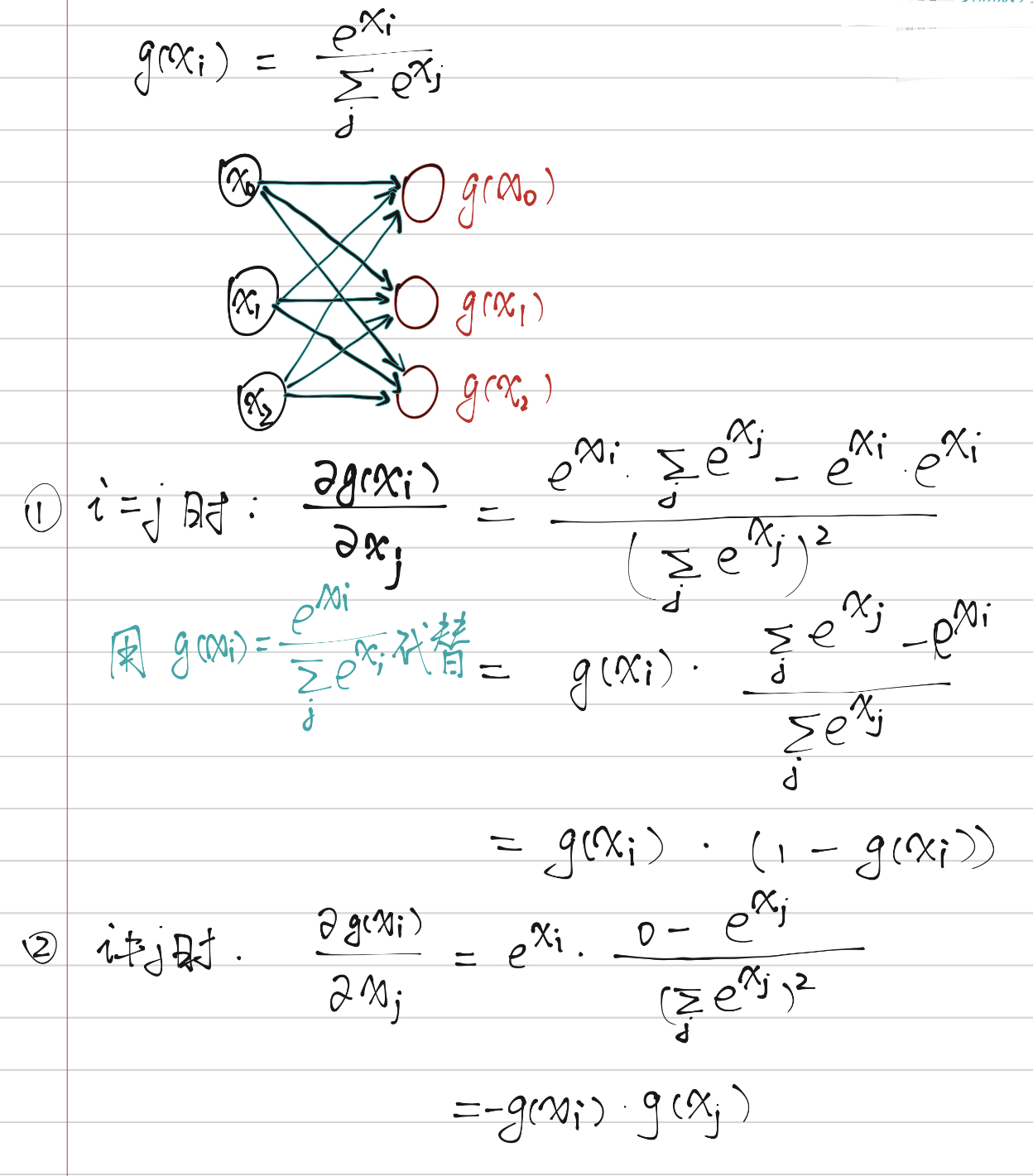
- 注softmax求导
推导过程:
-
cross entropy loss 求导
-
总结:softmax+cross entropy loss ,对$x_j$(这里可以看成是$z_{tj}$)求导,就是t==j时,对应位置的softmax值(也就是预测分数)减1,其他的不变: $$ \hat{y_t}=g(x_t)\
\frac{\partial{E_t}}{\partial{x_j}}=\left{ \begin{aligned} \hat{y_t}-1,t=j
\hat{y_j},t\neq j \end{aligned} \right. \frac{\partial{E_t}}{\partial{x}}=\frac{\partial{E_t}}{\partial{z_t}}=(\hat{y_t}-y_t^T) $$
2)$W$的反向求导:
- 首先要得到$E_t$对$s_t$的导数($(\hat{y_t}-y_t^T)$是k维(分类类别数),V是k*h的):
-
$s_t$对W求导 $$ s_t=tanh(Ws_{t-1}+Ux_t)\
\frac{\partial s_t}{\partial W}=(1-s_t^2)s_{t-1}\
\frac{\partial E_t}{\partial W}=V^T(\hat{y_t}-y_t^T)(1-s_t^2)s_{t-1} $$ 注:需要注意的是各部分之间的运算时element-wise dot ,outer times还是dot,这个需要根据纬度再来推导。
- 补充:
3)$U$的反向求导:$\frac{\partial{E_t}}{\partial{U}}$,和W推导过程的一样:
实现
def bptt(self, x, y):
T = len(y)
# Perform forward propagation
o, s = self.forward_propagation(x)
# We accumulate the gradients in these variables
dLdU = np.zeros(self.U.shape)
dLdV = np.zeros(self.V.shape)
dLdW = np.zeros(self.W.shape)
delta_o = o
delta_o[np.arange(len(y)), y] -= 1.
# For each output backwards...
for t in np.arange(T)[::-1]:
dLdV += np.outer(delta_o[t], s[t].T)
# Initial delta calculation: dL/dz
delta_t = self.V.T.dot(delta_o[t]) * (1 - (s[t] ** 2))
# Backpropagation through time (for at most self.bptt_truncate steps)
for bptt_step in np.arange(max(0, t-self.bptt_truncate), t+1)[::-1]:
# print "Backpropagation step t=%d bptt step=%d " % (t, bptt_step)
# Add to gradients at each previous step
dLdW += np.outer(delta_t, s[bptt_step-1])
dLdU[:,x[bptt_step]] += delta_t#这个地方不容易想到,本来应该是delta_t与x_t的外积(delta_t是h维的,x_t是d维的,U是h*d的,因为U对x_t是左乘),但是这里省略了这个乘法.因为X是输入句子中,单词在字典中是否出现,那么,就是one-hot的表示,因此可以省略这个外积运算,直接对标签为1的+delta_t即可。
# Update delta for next step dL/dz at t-1
delta_t = self.W.T.dot(delta_t) * (1 - s[bptt_step-1] ** 2)/#求s_t对s_{t-1}的导数,下一次循环就是s_{t-1}对U,W的导数了.
return [dLdU, dLdV, dLdW]
参考资料
https://zhuanlan.zhihu.com/p/32103001
https://zhuanlan.zhihu.com/p/32930648
https://github.com/pangolulu/rnn-from-scratch
https://www.cnblogs.com/wacc/p/5341670.html